
3D视觉成像原理介绍
发布时间:2023-07-13 | 信息来源:上海砚拓自动化科技有限公司 | 点击量:1276
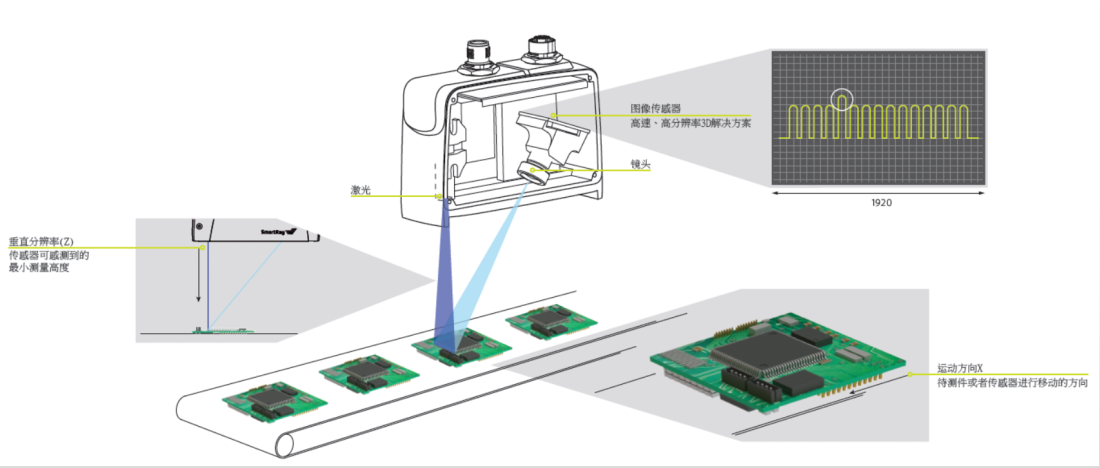
工业中的3D视觉成像原理是通过相机、光源和算法等共同协作,将被测物体的三维轮廓以点云形式呈现出来。
通过将激光线束投射到被测物体表面反射回图像传感器,获取激光线束与图像传感器的偏移角度,随着被测物体高度在不同点位的变化,反射激光线束在图像中呈现不同位置,从而实现对物体轮廓的测量,并利用被测物体与3D传感器的相对位移生成被测物体的完整的3D数据轮廓。
具体过程:
工业相机搭配深度传感器组成3D传感器。
通过算法实现采集空间信息,而空间信息一般是由空间的点集(X,Y,Z)构成,即点云。
输出深度图和亮度图。
在工业领域,通常用在高精度的产品检测以及空间无序分拣等工序。
上一篇:输送线3D抓取案例
下一篇:机器人3D视觉应用案例
