
基于结构光测量技术和3D物体识别技术开发的机器人3D视觉引导系统
发布时间:2023-09-01 | 信息来源:上海砚拓自动化科技有限公司 | 点击量:1301
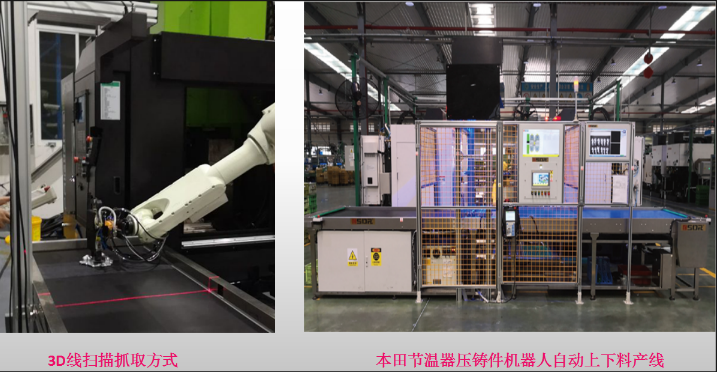
基于结构光测量技术和3D物体识别技术开发的机器人3D视觉引导系统,可对较大测量深度范围内散乱堆放的零件进行全自由的定位和拾取。相比传统的2D视觉定位方式只能对固定深度零件进行识别且只能获取零件的部分自由度的位置信息,具有更高的应用柔性和更大的检测范围。可为机床上下料、零件分拣、码垛堆叠等工业问题提供有效的自动化解决方案。
项目简介:
人工将产品随意摆放到上料线(左线),人工摆满后离开,预计1h后再过来摆放产品,收加工完成的产品;视觉负责拍照定位,机器人抓取负责放入OP10,OP20不同工序加工中心加工、取料、清洗。
上一篇:机械手应用于机床上下料的优势
